弧焊机器人焊缝跟踪分接触式跟踪、电弧跟踪和激光跟踪。2MM以下的薄板大多数采用激光作为焊缝跟踪来进行焊接,激光跟踪是通过前端的摄像头监控激光扫描得出焊缝信息反馈给安川机器人,安川机器人在焊接过程中会根据得出的数据来自动修改轨迹完成焊接。
接触传感器使用接触探针物理接触焊缝。当焊枪位置相对于工件变化时,探头沿相反方向偏转,控制器进行调整以使焊枪返回其原始位置。接触式焊缝跟踪系统最适合具有大而独特几何形状的焊缝。如果焊缝太小,探头可能会与焊缝失去接触并使焊枪偏离轨道。
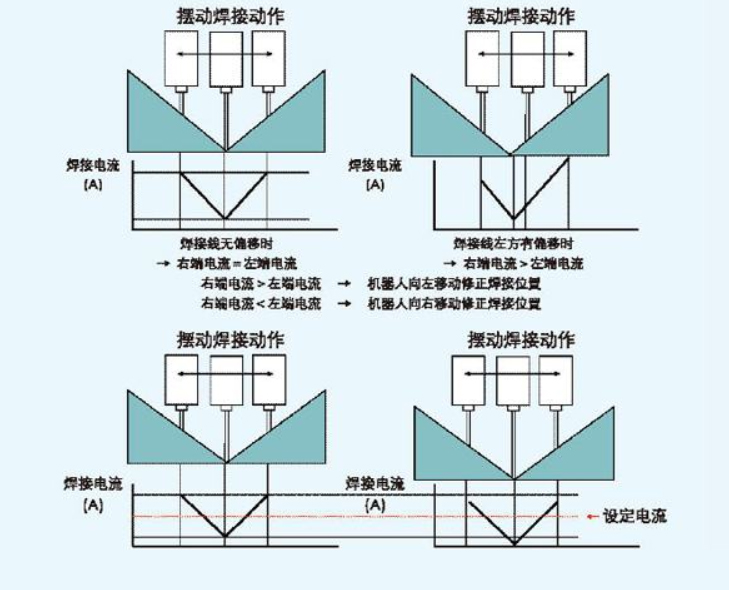
电弧跟踪系统使用电流和电压传感器的反馈来识别焊枪位置的变化。例如,如果我们焊接角焊缝,当焊枪偏离焊缝中心时,则焊枪到工件两侧的距离不同。对于这种跟踪方式,焊枪必须垂直于焊缝来回摆动。此时,系统不断地对焊缝左侧和右侧的焊接电流进行比较;两个电流波峰之间必须位于中心位置。电弧跟踪系统最适合结构明显的大焊缝,例如大斜面和角焊缝。电弧跟踪一般都用于厚板,多是些摆焊。像挖机斗臂,行车焊接等。通过焊丝接触母材边缘来计算出焊缝的大致位置,再回头通过摆焊来进行焊接。
激光视觉焊缝跟踪系统使用线结构光,光线投射到部件的表面上,在焊缝上形成明显的激光轮廓线。然后使用相机在一定角度观察激光线。线条轮廓与焊缝的几何形状完全匹配。然后通过轮廓寻找焊缝特征点,控制器通过对特征点位置的分析,调整焊枪位置以保证焊枪和焊缝之间保持恒定的位置关系。激光视觉系统具有非常高的分辨率,可以可靠地跟踪大型和小型焊缝。
电弧跟踪是先寻位再焊接,激光跟踪是边寻位边焊接,效率方面激光要快的多,而且电弧跟踪的精度也没有激光高,所以太精密的产品不适合用电弧跟踪。但电弧跟踪的成本要比出激光跟踪的低好几倍,所以要根据产品的实际情况来选择焊缝跟踪系统。


- 评论:(0)
发表评论 点击这里获取该日志的TrackBack引用地址